Keerthi SagarHi there! I am currently a Robotics and Automation Technologist at Irish Manufacturing Research CLG. Previously, I was a Marie-Curie Research Fellow at Irish Manufacturing Research CLG and KUKA, Ireland , where I was part of the Robotics and Automation team working on teleoperation and control strategies for automation in medical device manufacturing. My interest involves robot motion planning, optimization, and control. I am currently working on mobile robot planning, long horizon planning, cognitive strategies for task planning, and optimization & control strategies for fine and dexterous manipulation using haptic-visual techniques. Before starting my Marie-Curie PostDoctoral Fellowship, I obtained my Ph.D. in robotics from University of Genova, Italy under the guidance of Prof. Matteo Zoppi and Prof. Dimiter Zlatanov . Email / GitHub / Google Scholar / LinkedIn / Resume / |

|
AwardsFew awards won during my fellowship. |

|
Best Presentation AwardKeerthi Sagar, Stephen Caro, Philip Long IEEE International Conference on Control, Mechatronics and Automation (ICCMA, 2024), London, UK., 2024 webpage / Presented work on “Direct-Collocation based Trajectory Optimization of Cable Driven Parallel Robot Using an Analytical Kinetostatic Index” |

|
Hackathon Runners-UpKeerthi Sagar, Aayush Jain IMR, Mullingar, Ireland, 2024 webpage / Secured second-place in industrial-grade bin-picking challenge organized by European Union Project- ACROBA. |
Industrial Projects and Public DemonstrationsI have worked on industrial projects involving robot-robot collaboration, human-robot collaboration and teleoperation focussed towards medical-device manufacturing. I have worked on EU-H2020 project "COLLABORATE" and EU-FP7 project "SWARMITFIX". |
|
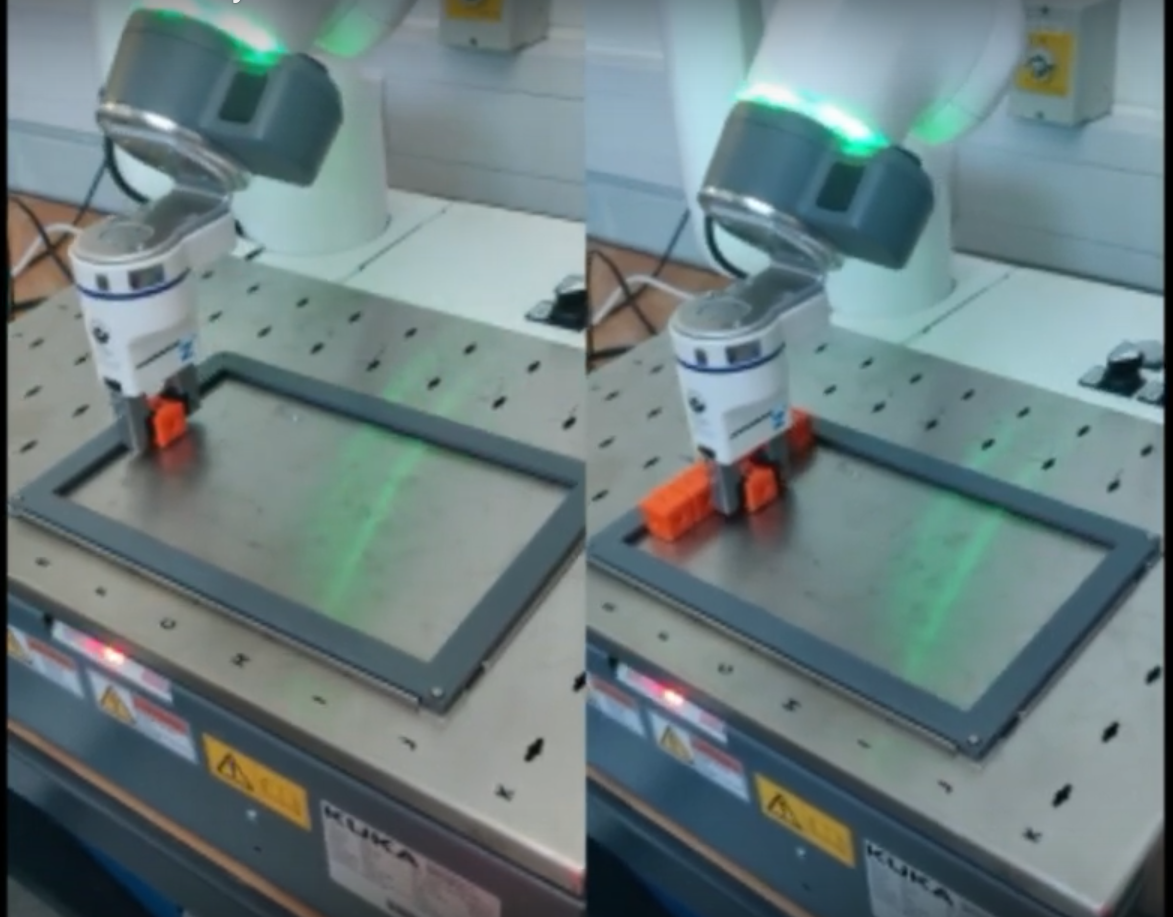
Force sensitivity demonstration of KUKA LBR IISYKeerthi Sagar Atlantic Technological University, Galway., 2024 video / Force sensitivity demonstration of KUKA LBR IISY |

|
Digital Twin of real robot in KUKA SIMKeerthi Sagar KUKA, Dundalk, Ireland, 2024 video / code / Work presents a code repository for real-time joint visualization of KUKA robot states in KUKA SIM using python port. |
|
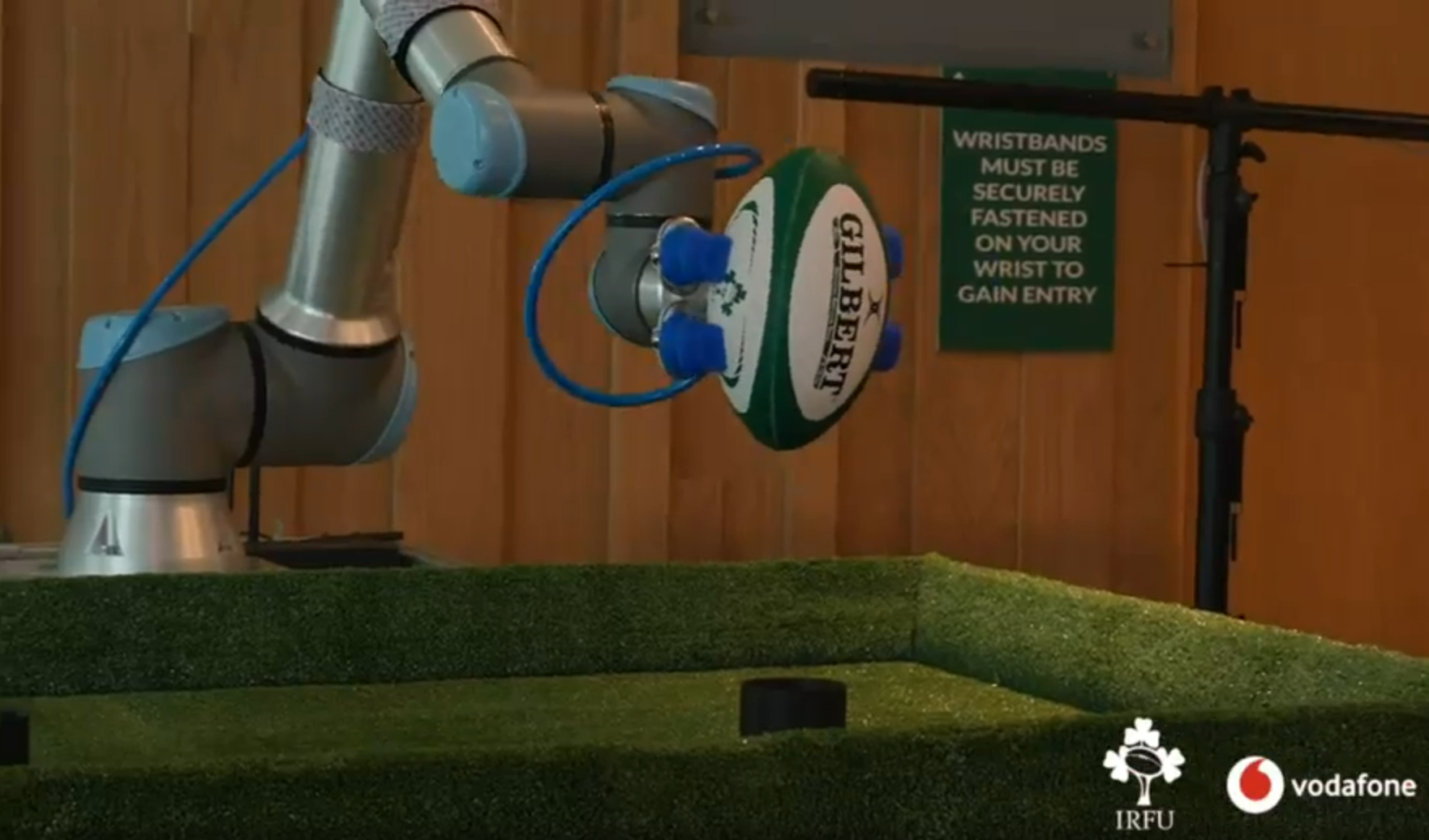
5G Use-case demonstration using TeleroboticsKeerthi Sagar Aviva Stadium, Dublin, Ireland, 2023 video / Developed a Telerobotics demonstrator to showcase Vodafone and IMR’s 5G Capabilities as part of my Marie-Curie fellowship. |
|
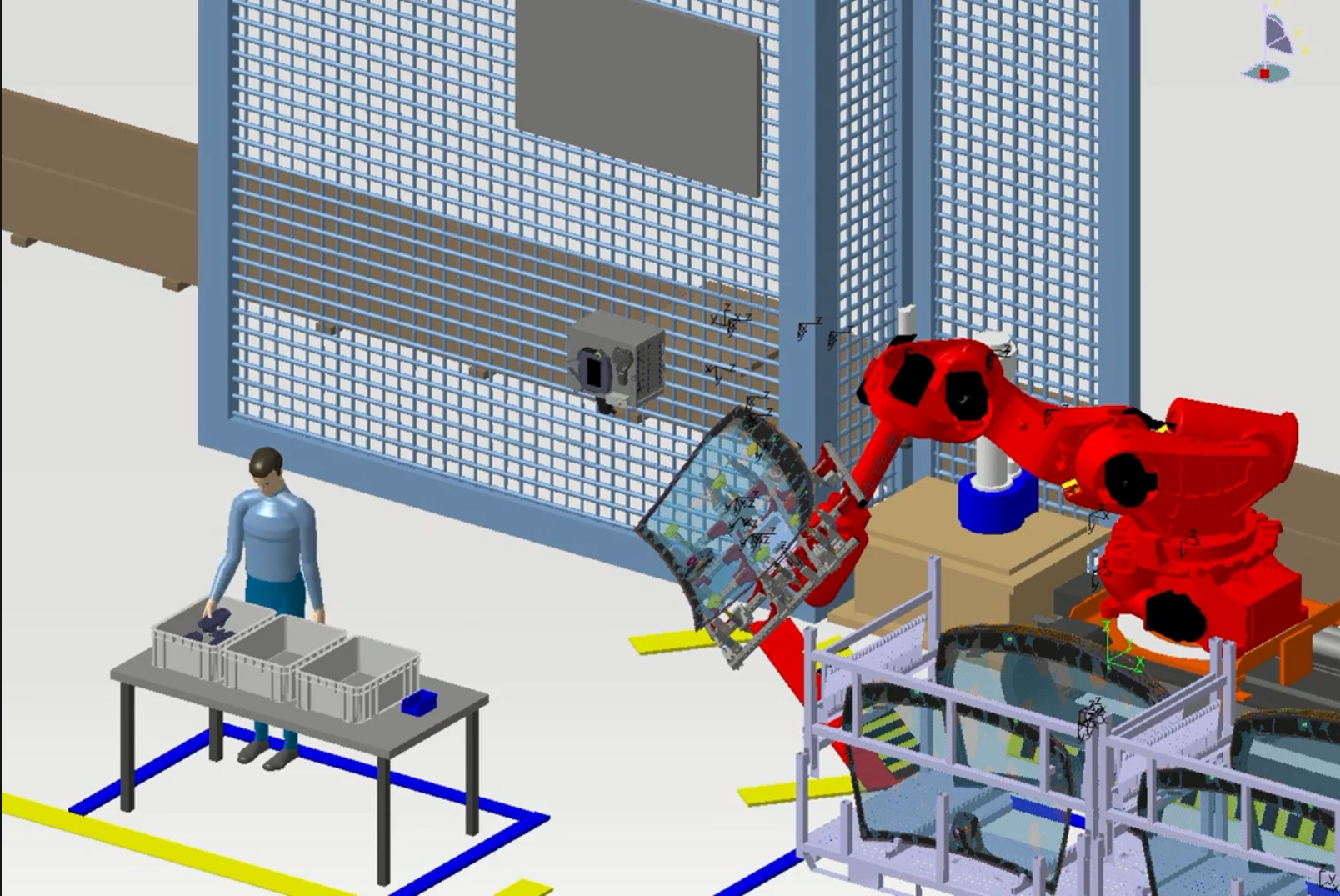
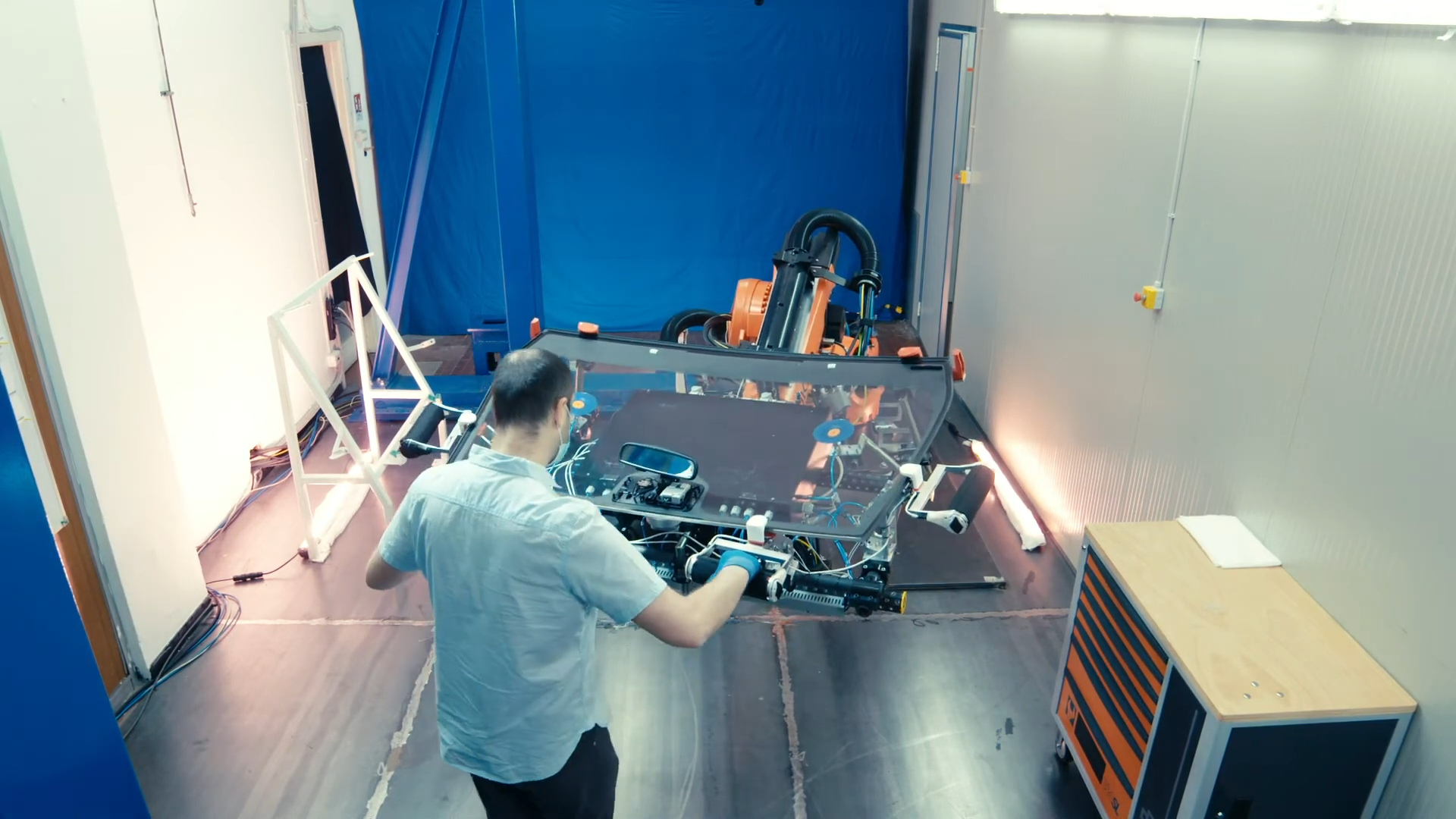
Digital Simulation of Human-Robot Collaborative Windshield assemblyKeerthi Sagar EU H2020 Project - CoLLaboratE, CRF-Fiat Italy., 2023 video / Delmia simulation showing Human-Robot Collaboration of windshield gripper assembly using a collaborative gripper equipped with tactile handles developed for CRF-Fiat, Italy |

|
VR Gaming Motion Simulator using Stewart PlatformPMAR Robotics Genova, Italy, 2019 video / code / Extensively involved the design team developing a custom 7-DOF Motion simulator for an Italian gaming company. |
ResearchI'm interested in robot motion planning, dexterous manipulation, kinematics and optimal control. |
|
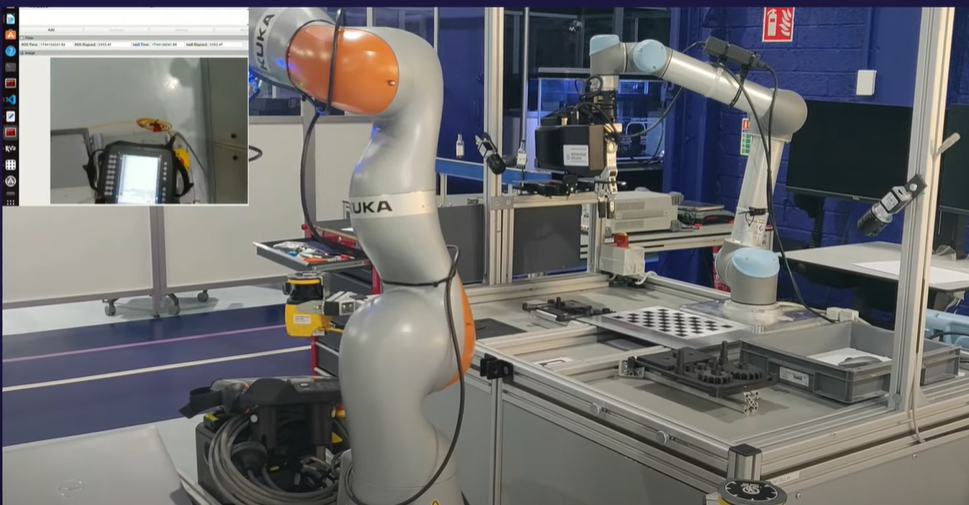
Agile Intralogistics with Mobile Robot and Collaborative Robot using ROS2 & Nav2Keerthi Sagar, Carlos Garcia Irish Manufacturing Research CLG,, 2025 video / code / KMR-iiwa mobile manipulator interacting with industrial cells to transport and assemble plastic gear-boxes. |
|
Tactile human-robot collaborative robot gripper for windshield inspection and assemblyFrancesco Grella, Keerthi Sagar, Roberto Canale, Michal Jilich, Alessandro Albini, Gorgio Cannata, Matteo Zoppi IET Digital Library, Human-Robot Collaboration,Unlocking the potential for industrial applications,2023, 2024 paper / video / Human-Robot collaboration to inspect and preassemble a car windshield using hand guidance and a tactile gripper. |
|
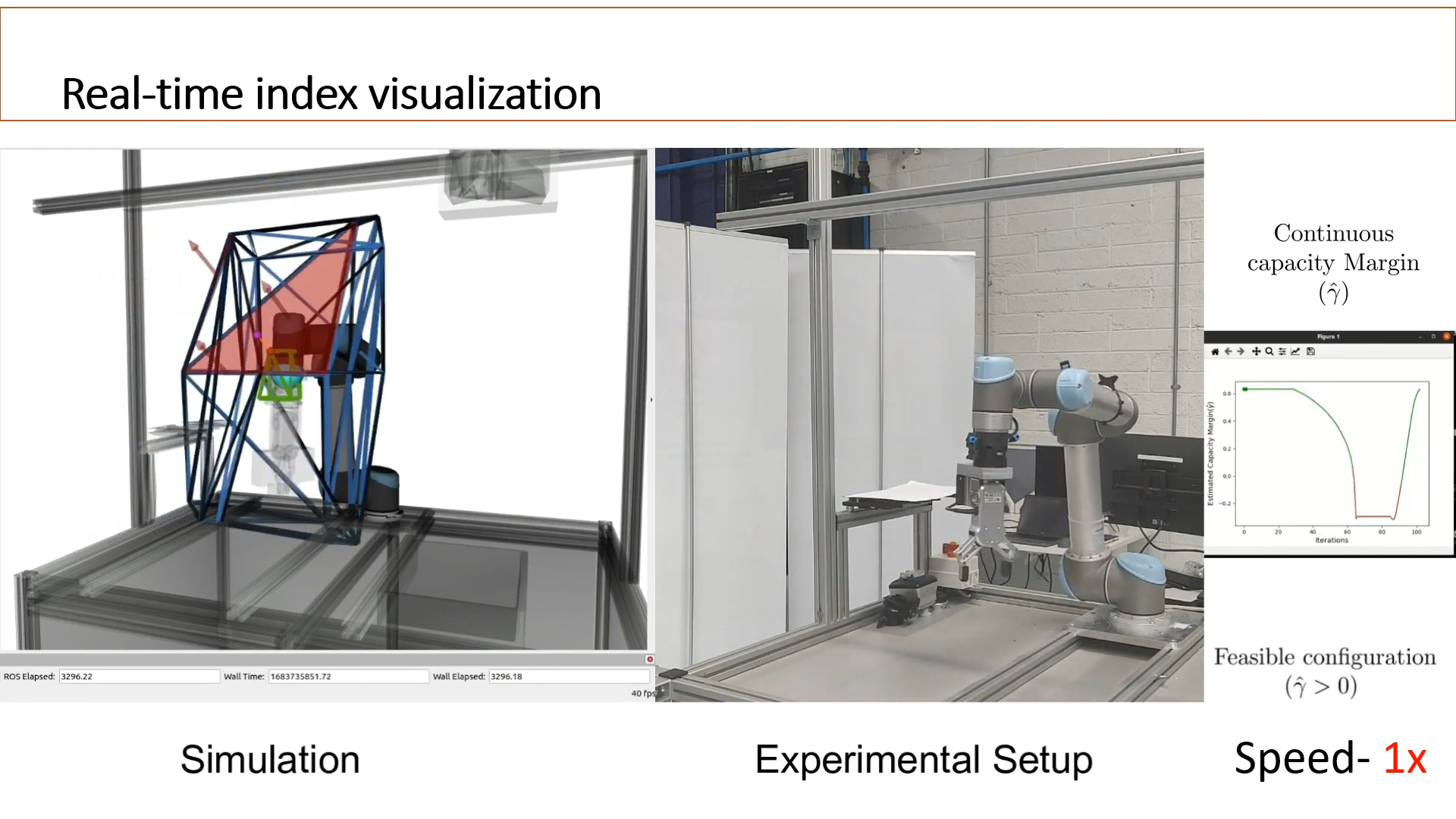
Polytope-Based Continuous Scalar Performance Measure With Analytical Gradient for Effective Robot ManipulationKeerthi Sagar, Stéphane Caro, Taskın Padır and Philip Long IEEE ROBOTICS AND AUTOMATION LETTERS, Presented at IEEE ICRA, Yokohama, Japan 2024,, 2023 paper / video / code / A polytope-based kinetostatic index to achieve complex force and velocity-targeted manipulation in both serial and parallel robots. |
|
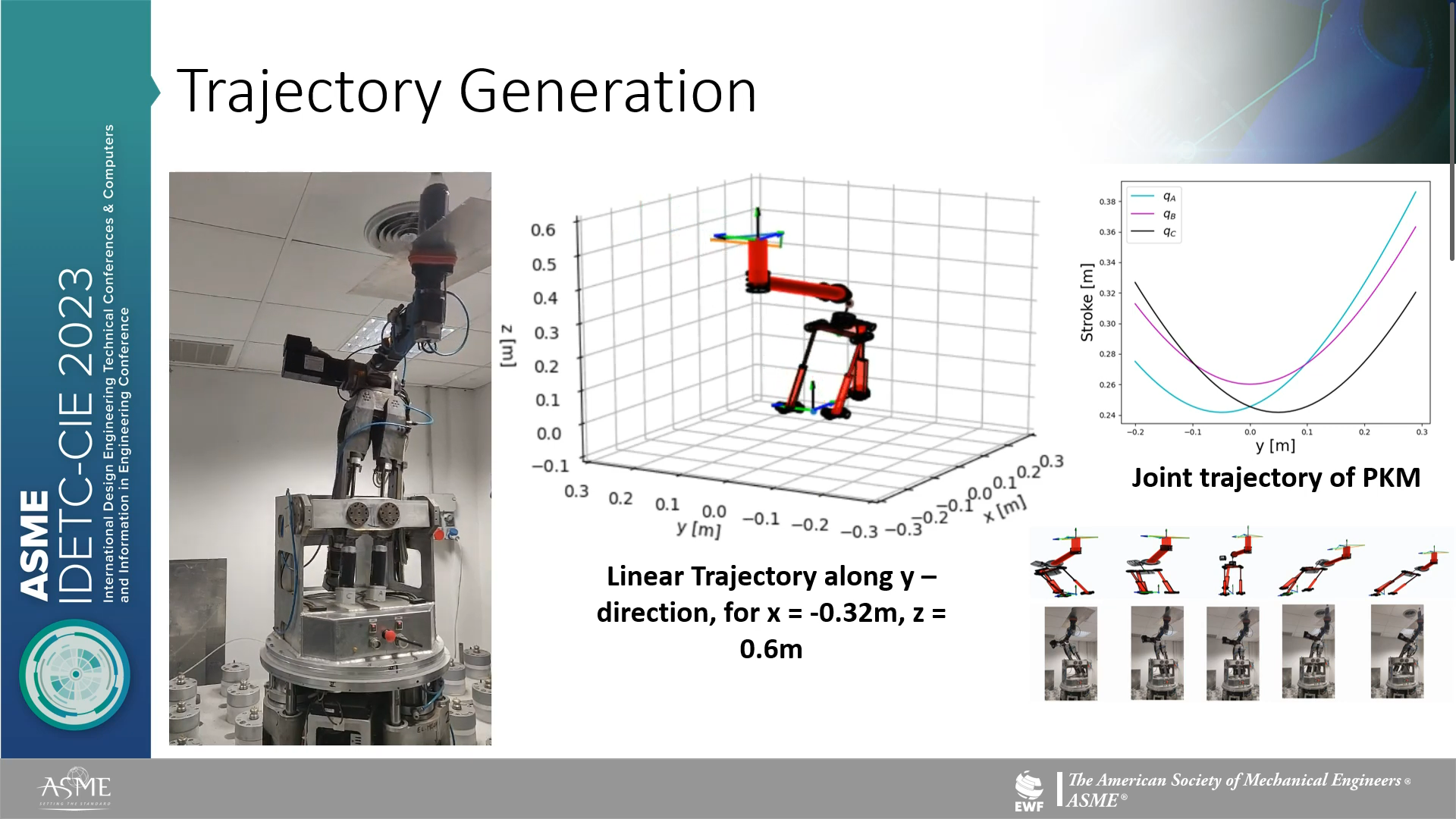
Towards High Dynamic Operations With Parallel-Serial Hybrid RobotsKeerthi Sagar, Vishal Ramadoss, and Matteo Zoppi ASME, IDETC, DETC2023-116954, V008T08A064, August,20,203, Boston, USA, 2023 paper / video / code / Motion generation and control of a parallel-serial hybrid robot architecture for high speed machining and fixturing in aerospace application. |
|
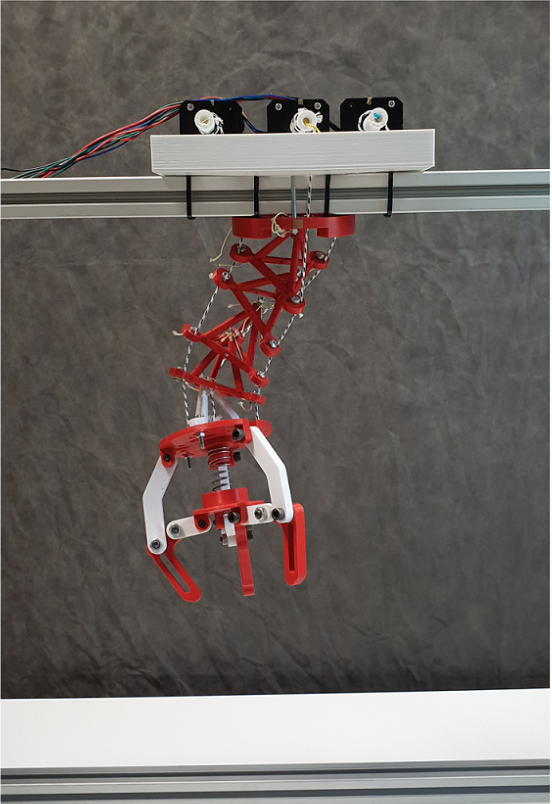
HEDRA: A Bio-Inspired Modular Tensegrity Robot With Polyhedral Parallel ModulesVishal Ramadoss*, "Keerthi Sagar*, Mohamed Sadiq Ikbal, Jesus Hiram Lugo Calles, Raghuveer Siddaraboina and Matteo Zoppi"- *Equal contribution" IEEE International Conference on Soft Robotics (RoboSoft), April 04-08 2022, Edinburgh, UK., 2022 paper / video / This paper proposes a new robotic mechanism based on tensegrity (‘tension-integrity’) robots and reconfigurable modular robots. |
|
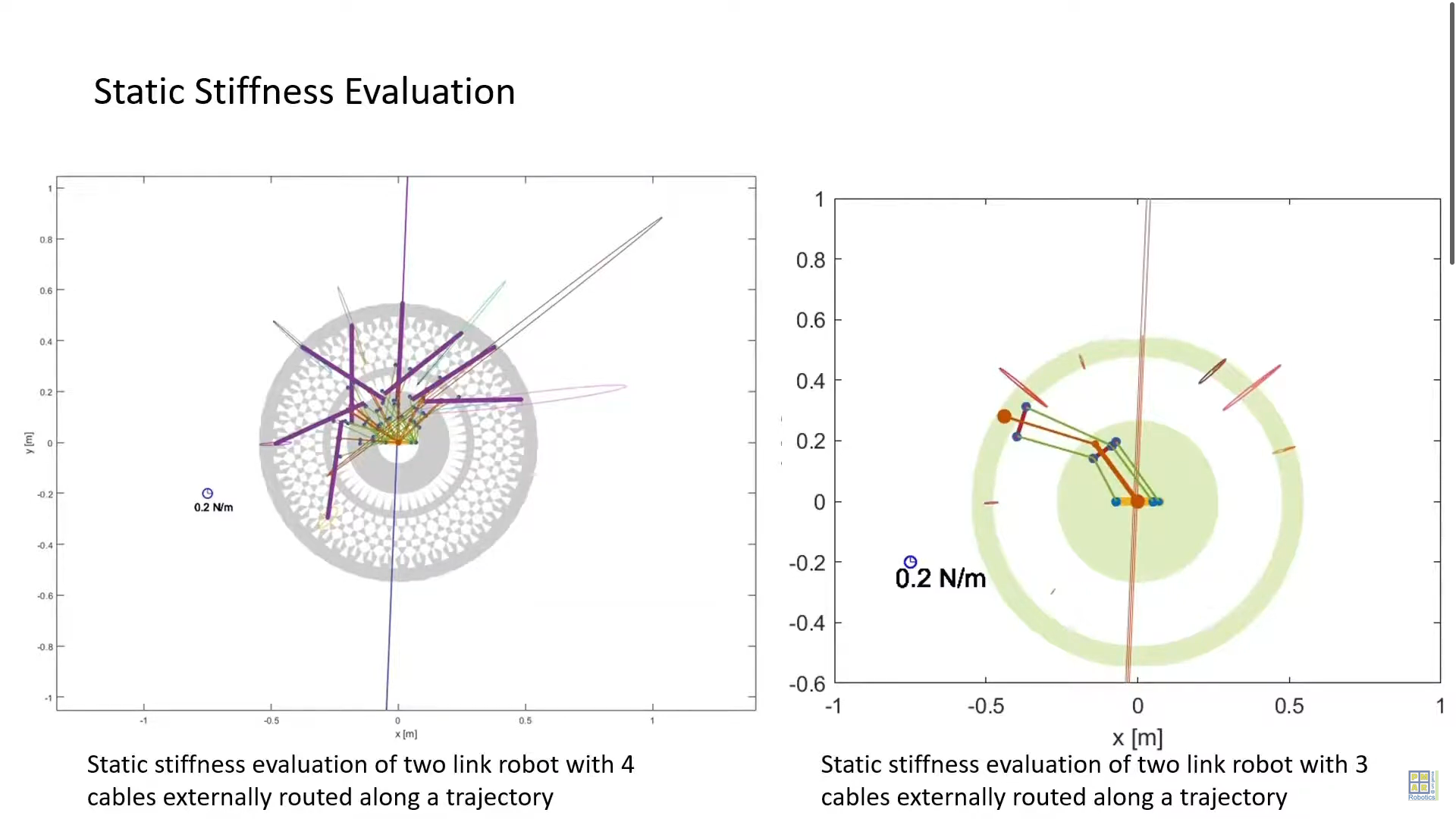
Modeling and Stiffness Evaluation Of Tendon-Driven Robot For Collaborative Human-Robot InteractionVishal Ramadoss, Keerthi Sagar (Equal first-author contribution), Mohamed Sadiq Ikbal, Dimiter Zlatanov, and Matteo Zoppi IEEE International Conference on Intelligence and Safety for Robotics (ISR), 2021 paper / video / code / Stiffness evaluation of tendon-driven serial kinematic chains which allow single-point and multi-point routing with bundling per rigid link. |
|
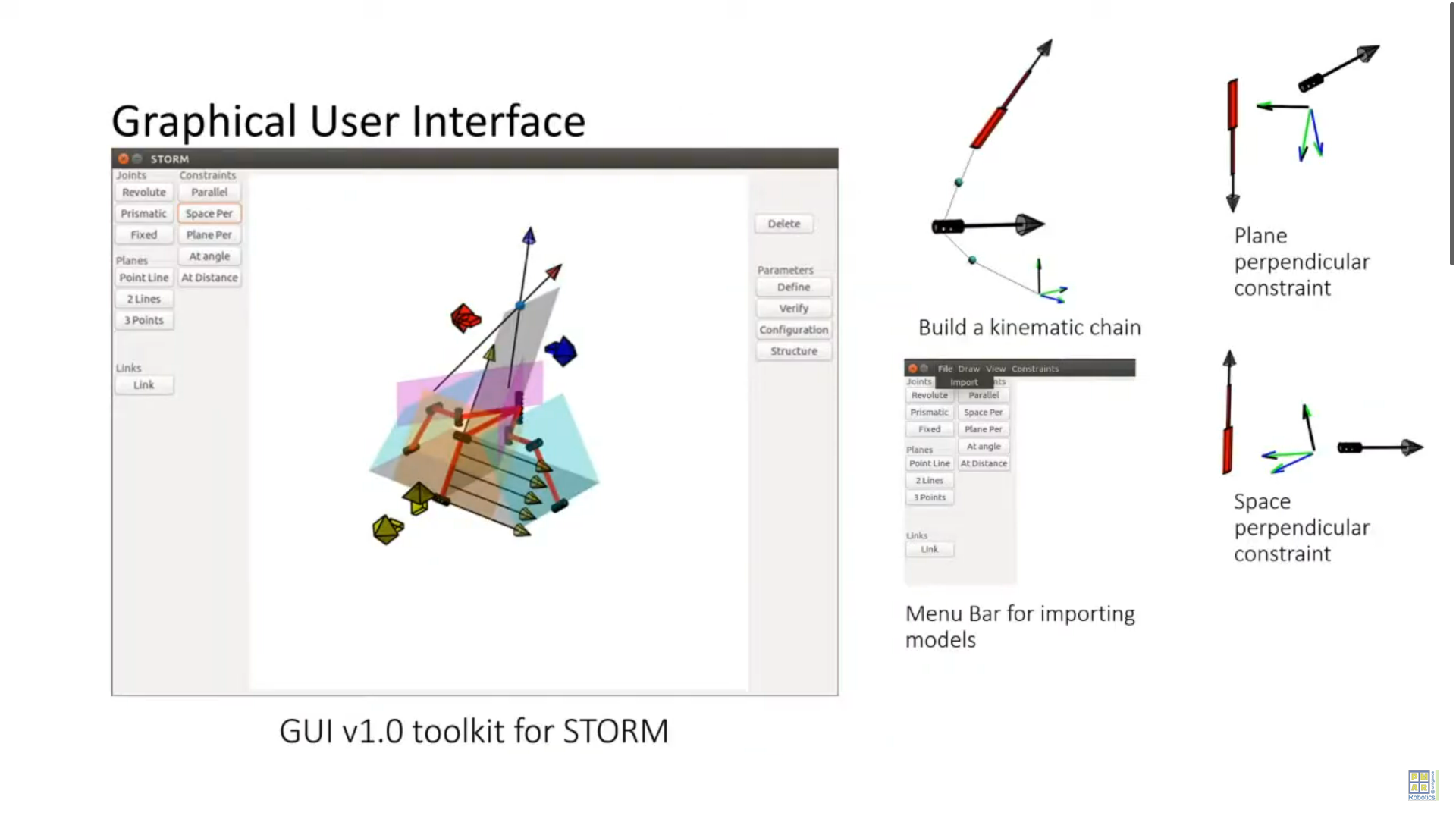
STORM: Screw Theory Toolbox For Robot Manipulator and MechanismsKeerthi Sagar*, Vishal Ramadoss*, Dimiter Zlatanov and Matteo Zoppi IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 25-29 2020, Las Vegas, NV, USA, 2021 paper / video / This work presents STORM, an educational and research oriented software framework for constraint and motion analysis and visualization of reciprocal screw systems for a class of robot manipulator and mechanisms |
|
Artificial intelligence planners for multi-head path planning of SwarmItFIX agentsSatheeshkumar Veeramani, Sreekumar Muthuswamy, Keerthi Sagar & Matteo Zoppi Journal of Intelligent Manufacturing, 2018 paper / code / Markov decision based planner for path planning triangular heads of the robotic fixturing agents using constrained satifsfaction problem (CSP). |
|
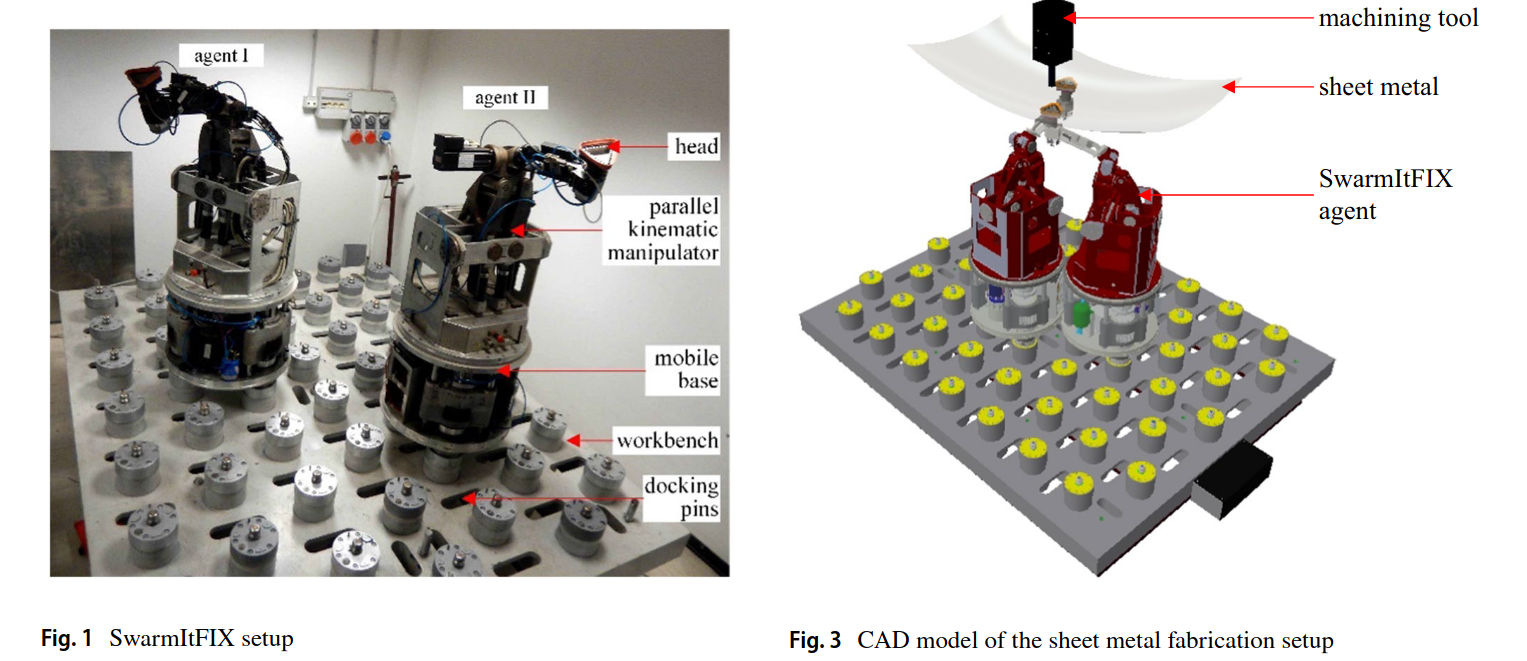
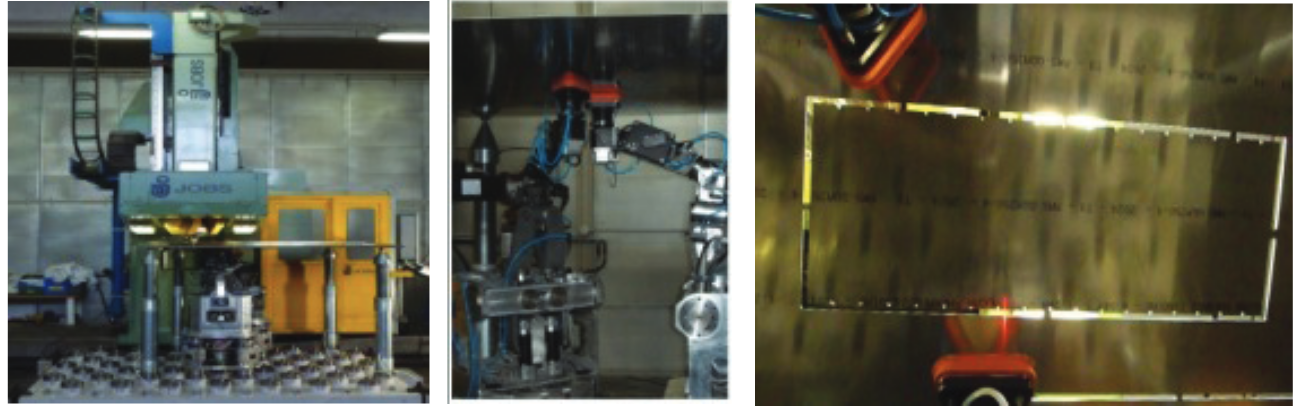
The SwarmItFix PilotKeerthi Sagar, Luis de Leonardo, Rezia Molfino, Teresa Zielińska, Cezary Zieliński, Dimiter Zlatanov, Matteo Zoppi Procedia Manufacturing, 2018 paper / code / A pilot cell including a traditional machine tool and an innovative robot-swarm cooperative conformable support for aircraft body panels. |

|
Miniaturized Flexible Flow Pump Using SMA ActuatorKeerthi Sagar, Procedia Engineering, 2013 paper / Miniaturized flexible fluid flow pump using SMA wires by inducing variable pressure difference within a felxible tube. |
|
Design and source code from Jon Barron's website. Jekyll version from Leonid Keselman's website |